Currículo: esta unidad desarrolla todos los saberes básicos del Bloque C – Robótica correspondiente a 2º ESO. Además, se evalúan los criterios que puedes encontrar al final de esta página.
Tabla de contenidos
- 6.1. Clasificación de robots: industriales y de servicios.
- 6.2. Aplicaciones de los robots.
- 6.3. Componentes: sensores, efectores y actuadores.
- 6.4. Robots móviles.
- 6.5. Programación con lenguajes de bloques.
- 6.6. Proyectos de robótica con Arduino
Hoy comenzamos nuestra incursión anual al mundo de la robótica, un campo de estudio y trabajo que está revolucionando la forma en la que vivimos, trabajamos y jugamos. La robótica, como bien sabéis, es una ciencia o rama de la tecnología que se ocupa del diseño, construcción, operación y aplicación de robots. En el curso anterior, tuvimos una primera toma de contacto, conociendo las bases: qué es un robot, las leyes que rigen su funcionamiento, una visión general de sus componentes y cómo se mueven (si no recuerdas nada de lo que estamos hablando, revisa estos apuntes antes de continuar).
En este nuevo nivel, 2º de ESO, vamos a profundizar en estos conocimientos y expandirlos. Aprenderemos sobre los diferentes tipos de robots que existen y cómo se clasifican. No solo entenderemos que hay robots que fabrican coches, sino que también los hay que nos ayudan en tareas cotidianas, como aspirar la casa o incluso realizar cirugías de alta precisión. Veremos cuáles son sus aplicaciones reales y cómo su uso está cambiando diversos aspectos de nuestra vida diaria.
Abordaremos con más detalle los componentes que hacen posible que un robot sienta, actúe y decida qué acción llevar a cabo en base a la información que recibe. Ya sabéis que los sensores son los ojos y oídos del robot, los actuadores son sus músculos y los efectores pueden ser comparados con sus manos, que interactúan con el entorno.
También nos adentraremos en el mundo de los robots móviles, esos que no están fijos en un lugar sino que se desplazan, desde los juguetes que siguen líneas hasta robots que exploran planetas en el espacio.
Y por supuesto, la programación. Si el año pasado tuvisteis un primer contacto con la programación de robots, este año iremos un paso más allá, aprendiendo a programar con lenguajes de bloques, una forma visual e intuitiva de dar instrucciones a un robot para que realice las tareas que queremos.
Prepárate, porque vamos a comenzar el bloque de robótica de 2º de ESO, un lugar donde la creatividad, la lógica y la tecnología se unen para abrir infinitas posibilidades.
6.1. Clasificación de robots: industriales y de servicios.
En el mundo de la robótica, nos encontramos con una gran variedad de máquinas diseñadas para cumplir funciones específicas. La manera más práctica de entender esta diversidad es mediante su clasificación. Nosotros vamos a enfocarnos en dos grandes grupos: los robots industriales y los robots de servicios.
6.1.1. Robots industriales.
Los robots industriales son, probablemente, los que se nos vienen a la mente cuando pensamos en robótica. Estos se utilizan, mayormente, en fábricas y entornos de producción masiva. Su principal tarea es realizar trabajos repetitivos, pesados o peligrosos con una eficiencia y precisión que difícilmente se podría alcanzar con trabajo humano.

Estos son algunos de los principales tipos de robots Industriales:
Robots articulados
Poseen brazos con varios ejes de rotación, similares a las articulaciones humanas, lo que les da una gran flexibilidad para moverse y realizar tareas complejas.

Robots SCARA
Especializados en movimientos de pick and place, es decir, coger algo de un lugar y depositarlo en otro, con movimientos muy rápidos y precisos.

Robots cartesianos
Operan en un sistema de coordenadas lineales (XYZ), ideal para trabajos de ensamblaje y CNC (control numérico por computadora).

Robots cilíndricos
Con un rango de movimiento que se extiende radialmente y en elevación, son útiles para montaje y manejo de materiales.

6.1.2. Robots de servicios.
Por otro lado, tenemos los robots de servicios, diseñados para asistir a los humanos en actividades que no son de manufactura. Estos robots pueden estar en hospitales, hogares, escuelas o incluso en la calle y su finalidad es mejorar nuestra calidad de vida o realizar tareas que requieren una interacción más directa con las personas o el entorno.
Un ejemplo clásico es el robot aspiradora que muchos tienen en sus casas. Este pequeño aparato se desplaza solo por las habitaciones, evitando obstáculos y limpiando el suelo.
Veamos algunos de los tipos fundamentales de robots de servicios:
Robots de asistencia personal
Están diseñados para ayudar a las personas en sus tareas diarias, como los robots que ayudan a las personas mayores o con discapacidad.

Robots médicos
Utilizados en operaciones quirúrgicas para realizar intervenciones con una precisión sobrehumana o para asistencia en rehabilitación.

Robots de vigilancia
Pueden patrullar áreas o monitorear ambientes, utilizando sensores para detectar movimientos o cambios en el entorno.

Robots de entretenimiento
Diseñados para interactuar con las personas y proporcionar entretenimiento, como los perros robot que responden a comandos y realizan trucos.

Los robots de servicios con frecuencia requieren una mayor capacidad de interacción e inteligencia artificial, ya que tienen que adaptarse a entornos más variables y, en ocasiones, impredecibles.
Como habéis visto, los robots se pueden clasificar según el entorno y las tareas para las que están diseñados. Los industriales están enfocados en la eficiencia y la producción, mientras que los de servicios buscan interactuar y colaborar con humanos, haciendo nuestras vidas más fáciles o entretenidas.
6.2. Aplicaciones de los robots.
La robótica nos ha llevado a un punto en el que los robots no solo son posibles, sino que están omnipresentes en nuestra vida cotidiana. Vamos a descubrir algunas de las aplicaciones más sorprendentes de los robots, que demuestran la versatilidad de estas máquinas.
Robots en la industria

En el sector industrial, los robots han causado una verdadera revolución, conocida como la automatización industrial. Ya hemos hablado de los robots en las líneas de ensamblaje de vehículos, pero sus aplicaciones van mucho más allá.
- Manufactura: realizan tareas de soldadura, pintura, montaje y control de calidad. Por ejemplo, un robot puede ser programado para ensamblar dispositivos electrónicos con una precisión y velocidad que supera a cualquier operario humano.
- Logística: en los almacenes, los robots automatizan la selección y el empaquetado de productos. Como en los grandes almacenes de Amazon donde los robots clasifican paquetes y los organizan para su envío, optimizando todo el proceso de distribución.
Robots en la medicina
La medicina es otro campo donde los robots están teniendo un impacto significativo.
- Cirugías asistidas por robots: los robots quirúrgicos permiten a los médicos realizar operaciones con una precisión milimétrica, a menudo a través de pequeñas incisiones que reducen el riesgo y el tiempo de recuperación de los pacientes.
- Rehabilitación: robots especializados asisten en la rehabilitación de pacientes, ayudándoles a recuperar movimientos después de un accidente o enfermedad. También, existen prótesis robóticas que pueden ser controladas con la mente, devolviendo la movilidad a personas que han perdido extremidades.
Robots en la agricultura
La robótica agrícola está comenzando a transformar la forma en que se cultiva y cosecha nuestra comida.
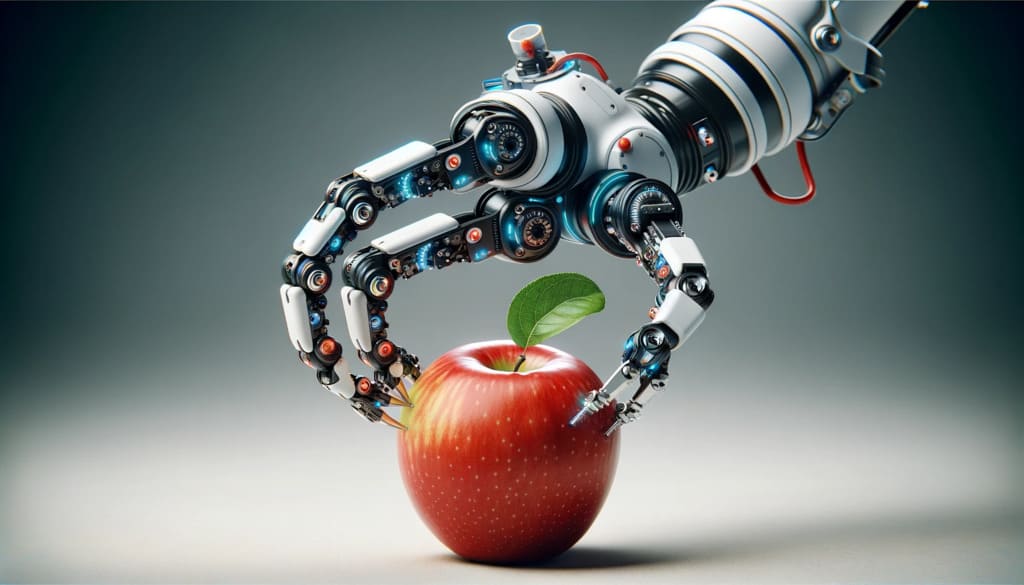
- Robots de cosecha: estos robots pueden identificar cuándo una fruta está madura y lista para ser cosechada, recogiéndose sin dañar el árbol o la fruta.
- Robots para cuidado de cultivos: pueden plantar semillas y cuidar cultivos, controlando plagas con precisión, lo que reduce la necesidad de pesticidas.
Robots en la educación y entretenimiento

Los robots también tienen un lugar en las aulas y en el ocio.
- Robots educativos: utilizados como herramientas de aprendizaje, pueden enseñar programación, matemáticas o ciencias a los estudiantes de una manera interactiva y divertida. Un buen ejemplo de ellos son las placas Micro:bit, los coches Mcqueen o la amplia gama de kits Arduino.
- Robots de entretenimiento: además de los juguetes robóticos que pueden interactuar con los niños, también existen robots en parques temáticos que entretienen y crean experiencias inmersivas para los visitantes.
Robots en casa
En nuestras propias casas, los robots de servicio están tomando un papel cada vez más activo.
- Electrodomésticos inteligentes: desde robots aspiradores hasta robots que cortan el césped o limpian la piscina, nos liberan de tareas domésticas tediosas y repetitivas.
- Asistentes personales: dispositivos robóticos que pueden controlar otros dispositivos inteligentes en el hogar, responder a comandos de voz y ayudar a gestionar nuestras rutinas diarias.
Robots en la ciencia
El deseo humano de explorar y comprender el universo ha llevado a los robots a lugares donde los humanos no pueden llegar fácilmente.
- Exploración espacial: los rovers, como los enviados a Marte, recogen datos sobre la superficie del planeta, la atmósfera y la posibilidad de vida pasada o presente.
- Investigación submarina: robots submarinos exploran las profundidades de los océanos, estudiando la vida marina, el ecosistema y el fondo marino, donde la presión sería demasiado extrema para los humanos.
Robots en la seguridad
Los robots también juegan un papel crucial en la seguridad de las personas y las naciones.
- Desactivación de explosivos: los robots bomba son fundamentales para la desactivación de explosivos, permitiendo que los expertos en desactivación de bombas hagan su trabajo a una distancia segura.
- Vigilancia: drones y otros robots de vigilancia se utilizan para monitorear zonas de alto riesgo o realizar seguimientos en misiones de reconocimiento, sin poner en peligro vidas humanas.
Robots en el transporte
La forma en que nos movemos y transportamos bienes está evolucionando gracias a la robótica.
- Vehículos autónomos: los coches sin conductor son un tipo de robot que combina sensores y software para transportar personas o mercancías sin necesidad de un conductor humano.
- Drones de entrega: estos robots voladores están empezando a utilizarse para entregar paquetes, haciendo que el proceso sea más rápido y eficiente, especialmente en zonas de difícil acceso.
▶️ Visualiza este vídeo para ver lo último en drones de entrega.
Robots en emergencias
En situaciones de desastre donde cada segundo cuenta, los robots pueden marcar la diferencia entre la vida y la muerte.
- Rescate: robots terrestres o aéreos pueden buscar a personas en áreas donde las condiciones pueden ser demasiado peligrosas para los rescatadores humanos, como en incendios forestales o edificios colapsados.
- Asistencia en desastres naturales: robots equipados con cámaras, sensores y herramientas pueden entrar en zonas afectadas por terremotos o inundaciones para buscar supervivientes y evaluar la infraestructura dañada.
Robots en la gestión de residuos
La sostenibilidad es una preocupación creciente, y los robots están contribuyendo a una gestión más eficiente de los residuos.
- Reciclaje automatizado: robots equipados con sistemas de visión y aprendizaje automático pueden clasificar residuos, separando materiales reciclables con una precisión y rapidez que supera a la clasificación manual.
- Limpieza de vertidos: robots especializados pueden ser utilizados para limpiar vertidos tóxicos o petroleros, reduciendo el daño ambiental y los riesgos para la salud humana.
Robots en la gastronomía
La robótica está entrando también en las cocinas, transformando la manera en que se preparan y sirven los alimentos.
- Robots cocineros: en algunos restaurantes, los robots ya preparan comidas completas, desde pizza hasta platos gourmet, asegurando consistencia y eficiencia.
- Servicio de mesa robotizado: en lugares como Japón, robots camareros sirven la comida y atienden a los clientes, mejorando la experiencia gastronómica con un toque tecnológico.
Como podéis ver, los robots tienen una gama de aplicaciones que va mucho más allá de lo que podríamos haber imaginado hace solo unas décadas. Estas máquinas inteligentes están diseñadas para mejorar nuestra productividad, precisión y eficiencia en un sinfín de tareas. En un futuro no muy lejano, los robots no serán solo herramientas que usamos, sino compañeros cotidianos que nos ayudarán en una multitud de formas, muchas de las cuales estamos apenas comenzando a explorar.
6.3. Componentes: sensores, efectores y actuadores.
En el curso pasado, descubrimos que los robots necesitan sensores, efectores y actuadores para interactuar con su entorno.
Si no recuerdas estos conceptos, te recomiendo que revises el punto 6.3. Aproximación a los componentes de un robot del Tema 6 del año pasado.
Este año vamos a profundizar en cómo estos componentes se integran y trabajan juntos para realizar tareas más complejas y cómo su mejora continúa expandiendo las capacidades de los robots en nuestro mundo.
6.3.1. Sensores avanzados.
Los sensores no solo permiten que un robot detecte su entorno, sino que también pueden proporcionar información detallada que los robots utilizan para tomar decisiones complejas.
Veamos sólo unos cuantos tipos a modo de ejemplo:
- Sensores de visión: estos incluyen cámaras que capturan imágenes y sistemas de visión por computador que procesan e interpretan estas imágenes. Por ejemplo, un robot que organiza productos en un supermercado necesita reconocer diferentes objetos y su ubicación para poder clasificarlos correctamente.

- Sensores de fuerza: imitan el sentido del tacto humano y permiten que un robot determine cuánta fuerza aplicar al agarrar un objeto delicado, como una fruta sin aplastarla.
- Sensores de equilibrio: estos son críticos en robots que deben mantenerse equilibrados en dos ruedas o que realizan tareas en entornos inestables, como los que se usan en la exploración de terrenos rocosos.

Veamos ahora con detalle cómo funciona un sensor tomando como ejemplo un sensor de visión, que es uno de los más complejos y fascinantes en la robótica.
Un sensor de visión en robótica suele ser una cámara digital que captura imágenes del entorno del robot. La funcionalidad de este sensor se puede dividir en varias etapas:
- Captura de imagen: la cámara del sensor de visión actúa como el ojo del robot, capturando la luz a través de una lente. Esta luz impacta en un sensor de imagen, que convierte la luz en una matriz de píxeles electrónicos.
- Procesamiento de imagen: una vez que la imagen ha sido capturada, es procesada por un ordenador integrado en el robot. Este procesamiento puede incluir la reducción de ruido, la corrección de color, o el ajuste de contraste para mejorar la calidad de la imagen capturada.
- Análisis de imagen: la etapa de análisis es donde la inteligencia artificial y el aprendizaje automático entran en juego. El software de visión por computador analiza los píxeles para identificar formas, colores, patrones y posiciones. Utiliza algoritmos para detectar bordes, clasificar objetos, y a veces hasta para reconocer escritura o rostros.
- Interpretación: tras analizar la imagen, el robot necesita interpretar lo que ve para tomar decisiones. Por ejemplo, si el robot está diseñado para clasificar productos en un supermercado, el software asociará ciertas formas y colores con productos específicos y determinará su ubicación en el espacio. Esta interpretación es crucial porque guía las acciones siguientes del robot, como moverse hacia el objeto, manipularlo o evitarlo.
- Retroalimentación: los sensores de visión a menudo trabajan en un ciclo de retroalimentación. Por ejemplo, si un robot intenta agarrar un objeto y la primera vez no tiene éxito, puede usar la información visual para ajustar su posición y fuerza y volver a intentarlo.
Es importante mencionar que los sensores de visión, como todos los sensores, tienen limitaciones. Pueden verse afectados por la iluminación del entorno, los reflejos, y otros factores visuales que pueden dificultar la interpretación de las imágenes. Por ello, los ingenieros trabajan continuamente en mejorar los algoritmos de procesamiento de imágenes y en combinar varios tipos de sensores para obtener una mejor comprensión del entorno que aumente la eficiencia y precisión de los robots.
Para finalizar, aquí tienes una aplicación práctica de los últimos avances en sensores de equilibrio:
6.3.2. Efectores complejos.
Un efector es cualquier dispositivo que se monta en el extremo de un robot y que interactúa con el entorno para realizar una tarea específica. Funciona como la parte ejecutora del sistema robótico, equivalente a cómo una mano humana manipula objetos. Los efectores pueden ser tan simples como una pinza o tan complejos como una herramienta multifuncional que realiza múltiples tareas.
Expliquemos cómo funciona un efector tomando como ejemplo un manipulador multifuncional.
Este tipo de efector es muy versátil y está diseñado para realizar varias funciones diferentes. Aquí está cómo opera:
- Cambio de herramienta: el manipulador está equipado con un sistema de cambio rápido que le permite intercambiar entre diferentes herramientas, como pinzas, destornilladores, o soldadores. Este cambio puede ser automático o controlado por el sistema central del robot. El efector podría tener un carrusel de herramientas que rota para seleccionar la herramienta adecuada o un mecanismo de acople para enganchar la herramienta necesaria de un almacén.
- Control de movimiento: una vez que la herramienta adecuada está en su lugar, el robot utiliza sus actuadores para mover el efector a la posición deseada. Esto puede implicar una combinación de movimientos en varios ejes y articulaciones para orientar la herramienta correctamente respecto al objeto con el que va a interactuar.
- Ejecución de la tarea: el efector realiza la tarea para la que ha sido diseñado, ya sea soldar componentes electrónicos, atornillar piezas o aplicar adhesivo. Los sensores integrados en el efector o en el robot proporcionan retroalimentación sobre la fuerza aplicada, la posición y el éxito de la operación. Por ejemplo, al soldar, un sensor puede verificar la temperatura y ajustarla para asegurar una soldadura adecuada.
- Sistemas de control: toda la operación está coordinada por un sistema de control que ejecuta programas específicos para cada tarea. Estos programas son a menudo el resultado de un diseño detallado que involucra la simulación y la programación de la secuencia exacta de movimientos y acciones que el efector debe realizar.
- Ajuste: al igual que con los sensores, los efectores también dependen de la retroalimentación para ajustar sus operaciones. Si se detecta un error en la tarea, como un tornillo mal colocado o una soldadura defectuosa, el sistema puede corregirlo automáticamente o alertar a un operador humano para su intervención.
Los efectores multifuncionales son fundamentales en la robótica moderna porque aumentan la eficiencia de los robots, permitiéndoles realizar múltiples tareas sin la necesidad de cambiar físicamente de máquina o de tener un robot dedicado para cada función. Con el avance de la tecnología, estos efectores se vuelven cada vez más sofisticados, incorporando inteligencia artificial y aprendizaje automático para mejorar su rendimiento.
6.3.3. Actuadores de alta precisión.
Los actuadores son esenciales para el movimiento y la acción de un robot. Su desarrollo ha llevado a la creación de robots más rápidos, fuertes y precisos.
Veamos algunos de los dos tipos más conocidos:
Actuadores eléctricos
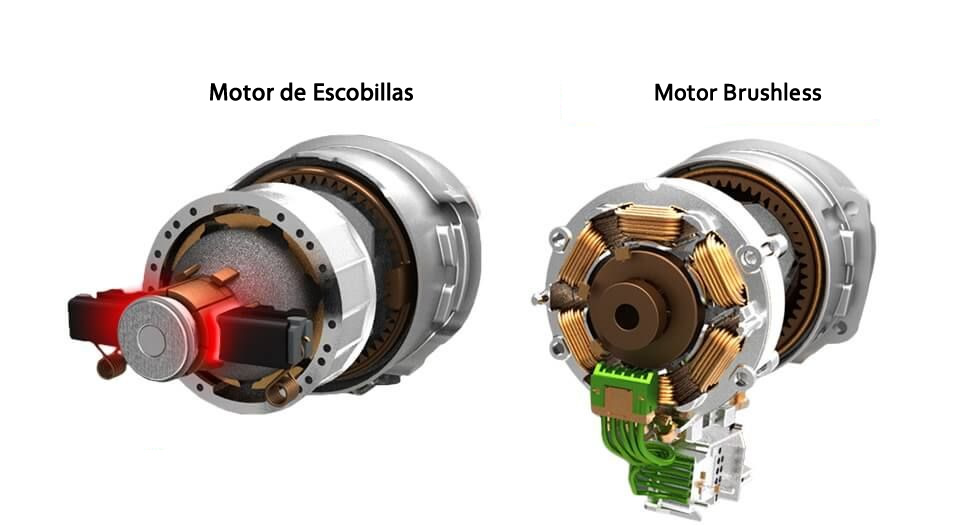
Los actuadores eléctricos convierten la energía eléctrica en movimiento mecánico. Los dos tipos más comunes en la robótica son los motores sin escobillas y los servomotores.
- Motores sin escobillas (brushless): estos motores utilizan imanes permanentes y campos electromagnéticos para generar movimiento. No tienen escobillas para conducir la corriente eléctrica dentro del motor, lo que significa menos fricción, mayor eficiencia, menos mantenimiento y una vida útil más larga. La corriente eléctrica se suministra a bobinas fijas dentro del motor, creando un campo magnético que interactúa con los imanes en el rotor (parte giratoria del motor) para producir movimiento rotativo.
- Servomotores: son motores eléctricos que pueden moverse a una posición exacta. Están equipados con sensores de retroalimentación, como encoders, que les permiten controlar con precisión el ángulo, la velocidad y la aceleración. Un controlador envía una señal al servomotor indicando a qué posición moverse, y el sensor de retroalimentación confirma que la posición se ha alcanzado. Si hay alguna diferencia entre la posición deseada y la real, el controlador ajusta la señal para corregir el movimiento.

Actuadores neumáticos e hidráulicos
Los actuadores neumáticos e hidráulicos utilizan respectivamente aire comprimido o fluidos bajo presión para generar movimiento.
- Actuadores neumáticos: funcionan cuando el aire comprimido se introduce en un cilindro neumático. La presión del aire empuja un pistón dentro del cilindro, creando un movimiento que puede ser lineal o rotativo. La cantidad de aire y la presión aplicada regulan la fuerza y la velocidad del movimiento. Son conocidos por su capacidad para realizar movimientos rápidos y potentes, pero su control de posición no es tan preciso como el de los actuadores eléctricos.
- Actuadores hidráulicos: funcionan de manera similar a los neumáticos, pero usan un líquido incompresible para mover el pistón. Debido a la incompresibilidad del fluido, los actuadores hidráulicos pueden manejar cargas mucho mayores y mantener una fuerza constante de manera más efectiva que los neumáticos. Son ideales para aplicaciones que requieren una gran cantidad de fuerza, como la maquinaria de construcción.
Para ambos tipos de actuadores, el control preciso es fundamental. Los robots modernos utilizan sistemas de control avanzados que incluyen, entre otros:
- Controladores PID (Proporcional-Integral-Derivativo): estos son algoritmos de control que toman la señal de error (la diferencia entre la posición deseada y la actual) y calculan la señal de salida para minimizar este error lo más rápido posible sin causar inestabilidad.
- Interfaces de usuario: permiten a los operadores programar y ajustar los movimientos del robot, estableciendo parámetros como límites de velocidad, aceleración y fuerza.
- Software de simulación: antes de que un robot realice una tarea, el software de simulación puede predecir cómo se comportarán los actuadores y ajustar los programas para optimizar el rendimiento y evitar errores.
La elección entre actuadores eléctricos, neumáticos o hidráulicos depende de las necesidades específicas de la aplicación, como la necesidad de precisión, fuerza, velocidad, eficiencia energética y capacidad de integración en sistemas de control más amplios. Los ingenieros seleccionan el tipo de actuador basándose en estas consideraciones para diseñar robots que puedan realizar las tareas requeridas de la manera más efectiva y eficiente posible.
6.3.4. Integración de componentes.
La integración de los componentes en un sistema robótico es un proceso complejo que implica la sincronización y comunicación efectiva entre sensores, efectores y actuadores, todo ello coordinado por sistemas de control.
Veamos cómo funciona esta integración paso a paso:
- Recopilación de datos a través de sensores: todo comienza con los sensores, que están constantemente recogiendo datos del entorno. Estos pueden ser datos visuales, sonidos, distancias, temperaturas, presiones, etc. Cada sensor está diseñado para convertir diferentes tipos de energía del entorno (como la luz o el calor) en señales eléctricas que pueden ser interpretadas por el controlador del robot.
- Procesamiento de datos: las señales de los sensores se envían a una unidad central de procesamiento (CPU) dentro del robot. Aquí, el software de control procesa y analiza estos datos utilizando algoritmos específicos.
- Toma de decisiones: basándose en la programación y los datos recibidos, la CPU toma decisiones sobre qué acciones debe realizar el robot. Esta toma de decisiones puede ser simple, como seguir una línea en el suelo, o compleja, como decidir qué camino tomar en un entorno desconocido.
- Ejecución a través de actuadores y efectores: una vez que la CPU ha decidido la acción, envía comandos a los actuadores y efectores. En el caso de los actuadores, estos comandos controlarán el movimiento del robot, como girar las ruedas o mover un brazo. En el caso de los efectores, como una pinza o una herramienta, se activarán para realizar una tarea, como agarrar un objeto o soldar un componente.
- Retroalimentación: durante y después de la ejecución de la acción, los sensores continúan proporcionando datos al sistema de control. Si se detecta algún error o desviación, se hacen ajustes. Por ejemplo, si un robot está colocando un objeto y no está perfectamente alineado, los sensores de fuerza y tacto pueden detectarlo y el sistema de control puede ajustar el movimiento de los actuadores para corregir la posición del objeto.
- Interfaz hombre-máquina (HMI): los operadores humanos interactúan con el robot a través de la HMI, que puede ser una pantalla táctil, un conjunto de botones, una consola de programación o incluso sistemas de control avanzados como los que utilizan comandos de voz o gestos. La HMI permite al operador configurar, programar y controlar el robot, así como recibir información del robot sobre su estado o su entorno.
- Comunicaciones: en entornos más complejos, varios robots y sistemas de control pueden necesitar comunicarse entre sí. Esto se hace a través de redes cableadas o inalámbricas, utilizando protocolos de comunicación estandarizados que permiten compartir datos y coordinar acciones.
La integración de componentes es fundamental para la funcionalidad de un robot. La precisión en la integración y la calidad de la coordinación entre los diferentes sistemas determinan la eficacia con la que un robot puede realizar tareas complejas y adaptarse a nuevos entornos. Con el avance de la inteligencia artificial y la robótica, estos sistemas se vuelven cada vez más autónomos y capaces de realizar tareas sin intervención humana directa.
Recuerda, los sensores, efectores y actuadores son mucho más que simples componentes: son los facilitadores de la capacidad de un robot para interactuar, adaptarse y realizar tareas en un mundo cambiante y a menudo impredecible. A medida que estos componentes avanzan, también lo hace la sofisticación de los robots en nuestra vida cotidiana. Con una comprensión más profunda de estos componentes, podréis no solo entender mejor cómo funcionan los robots, sino también imaginar nuevas aplicaciones y mejoras para los robots del futuro.
6.4. Robots móviles.
Los robots móviles han capturado nuestra imaginación durante décadas, y ahora son una realidad en muchos aspectos de la vida cotidiana. Estos robots se caracterizan por su capacidad para moverse de manera autónoma o controlada a través de diferentes entornos, desde el hogar hasta el espacio exterior.

Pero, la magia de los robots móviles no está solo en las tareas que pueden realizar, sino en cómo logran desplazarse por sí mismos de un lugar a otro. Piensa en el nivel de ingeniería que hay detrás de un robot que puede moverse por su cuenta, decidir cuándo girar, cuándo detenerse y qué camino es el mejor para llegar a su destino. Esto es lo que hace un robot móvil. Vamos a desglosar el funcionamiento de estos robots de la manera más sencilla posible.
6.4.1. Cómo se orientan y se mueven.
Los robots móviles se desplazan gracias a una serie de pasos que incluyen la percepción del entorno, el procesamiento de la información y la ejecución de movimientos:
- Percepción: utilizan sensores para entender su entorno. Por ejemplo, un robot aspirador tiene sensores que le permiten detectar obstáculos como muebles o escaleras para evitarlos.
- Procesamiento de la información: una vez que los sensores captan la información, el cerebro del robot (un ordenador) decide qué hacer. Si detecta una escalera, por ejemplo, sabe que debe girar para evitar caerse.
- Ejecución del movimiento: después de procesar la información, el robot activa sus actuadores, que son como sus músculos, para moverse en la dirección deseada. En nuestro ejemplo del robot aspirador, si necesita girar a la derecha para evitar la escalera, enviará energía a las ruedas para realizar ese movimiento.
6.4.2. Cómo toman decisiones.
Los robots móviles están programados con algoritmos que les ayudan a tomar decisiones:
- Algoritmos de navegación: son como las instrucciones paso a paso que sigues para hacer un ejercicio en clase. Le dicen al robot cómo llegar de un punto A a un punto B sin chocar con nada o perderse.
- Algoritmos de evitación de obstáculos: funcionan como tu instinto de apartarte cuando algo se te cruza en el camino. El robot usa estos algoritmos para cambiar su ruta en tiempo real y evitar colisiones.
Además, si está asistido por IA, es capaz de aprender sobre la marcha y modificar sus decisiones en función de lo que ya ha aprendido del entorno.
6.4.3. Cómo aprenden de sus errores.
Los robots móviles, al igual que nosotros, tienen la capacidad de aprender de sus experiencias, lo que les permite mejorar su rendimiento con el tiempo. Esta capacidad de aprendizaje proviene de un campo de la inteligencia artificial conocido como aprendizaje automático (machine learning en inglés).
Vamos a ver cómo funciona este proceso:
- Recolección de datos: primero, el robot debe recoger datos de sus acciones y del entorno. Cada vez que el robot realiza una tarea, como moverse por la sala de estar, recopila información sobre lo que funcionó bien y lo que no. Por ejemplo, si choca con una silla, registra la posición de la silla y la ruta que tomó que llevó al choque.
- Análisis de datos: luego, el robot analiza estos datos para identificar patrones o errores. Utilizando algoritmos de aprendizaje automático, puede entender que acercarse demasiado a los muebles desde ciertos ángulos aumenta las posibilidades de colisión.
- Ajuste de estrategias: con esta comprensión, el robot ajusta sus algoritmos de navegación. Esto puede significar cambiar la forma en que calcula su ruta para dar más espacio alrededor de los muebles o aprender a reconocer objetos que antes no podía identificar correctamente.
- Prueba y error: al igual que los humanos practican una habilidad una y otra vez, los robots pueden usar simulaciones o experiencias reales para probar sus nuevas estrategias. En cada intento, recopilan más datos, analizan los resultados y ajustan sus métodos en consecuencia.
- Retroalimentación continua: el aprendizaje es un ciclo continuo. Los robots utilizan la retroalimentación de sus acciones para realizar mejoras incrementales. Si un ajuste no funciona como se esperaba, el robot puede revertir el cambio o intentar una nueva modificación.
Es importante destacar que todo este proceso de aprendizaje se realiza dentro de los límites de seguridad y funcionalidad programados por los humanos. Esto significa que el robot no aprenderá comportamientos que puedan ser peligrosos o dañinos.
Repasemos el proceso con un coche Maqueen asistido con IA.
Lo hemos programado para seguir una línea en el suelo. La primera vez que lo intenta, tal vez no siga la línea perfectamente y se desvíe. El robot tiene sensores que detectan cuándo se ha alejado de la línea y utiliza esta información para ajustar su dirección. Con cada intento, el robot ajusta su dirección más rápidamente y con mayor precisión, aprendiendo de sus errores anteriores. A medida que practica, se vuelve mejor siguiendo la línea, hasta que eventualmente puede hacerlo a la perfección.
Este tipo de aprendizaje permite que los robots móviles se vuelvan más autónomos y efectivos, reduciendo la necesidad de intervenciones humanas y permitiendo que realicen tareas más complejas. Como alumnos, al observar a estos robots, podéis obtener una visión fascinante de cómo se podría aplicar la inteligencia artificial y el aprendizaje automático en el futuro, no solo en robótica sino en muchas otras áreas de la tecnología y la vida diaria.
Cada vez que veas un robot móvil, piensa en todas las decisiones que está tomando por sí solo para moverse. Y recuerda, lo que hace que los robots móviles sean especiales no es solo su capacidad para realizar tareas, sino cómo aprenden, se adaptan y toman decisiones por sí mismos, un poco como nosotros cuando aprendemos algo nuevo.
6.5. Programación con lenguajes de bloques.
Después de haber adquirido una comprensión básica de la programación y su aplicación en la robótica durante el curso anterior, ahora vamos a repasar la metodología de la programación con lenguajes de bloques. Estos lenguajes son especialmente útiles y amigables para seguir desarrollando nuestras habilidades de programación de robots.
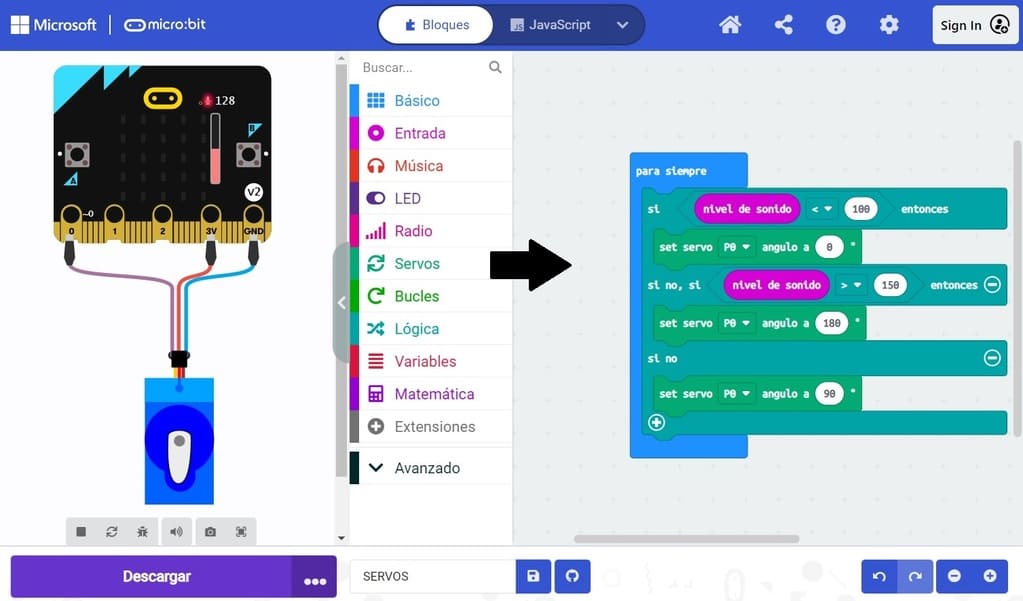
La herramienta de referencia que utilizaremos será MakeCode, aunque realizaremos proyectos con otras como MIT App Inventor, Arduino IDE o Tinkercad.
6.5.1. Características de los lenguajes de bloques.
Los lenguajes de programación por bloques son ideales para vosotros porque transforman conceptos de programación complejos en elementos visuales interactivos que se pueden manipular fácilmente. Están son algunas de sus características:
- Interfaz visual: en lugar de escribir líneas de código, arrastráis y soltáis bloques que representan diferentes instrucciones o acciones para vuestros robots.
- Organización lógica: cada bloque se encaja con otros de manera que os ayuda a entender la estructura del programa: qué instrucciones van primero, cuáles siguen después y cómo se relacionan entre sí.

- Simplicidad: los bloques están diseñados para ser simples y auto explicativos, lo que os permite concentraros en la lógica del programa más que en la sintaxis del código.
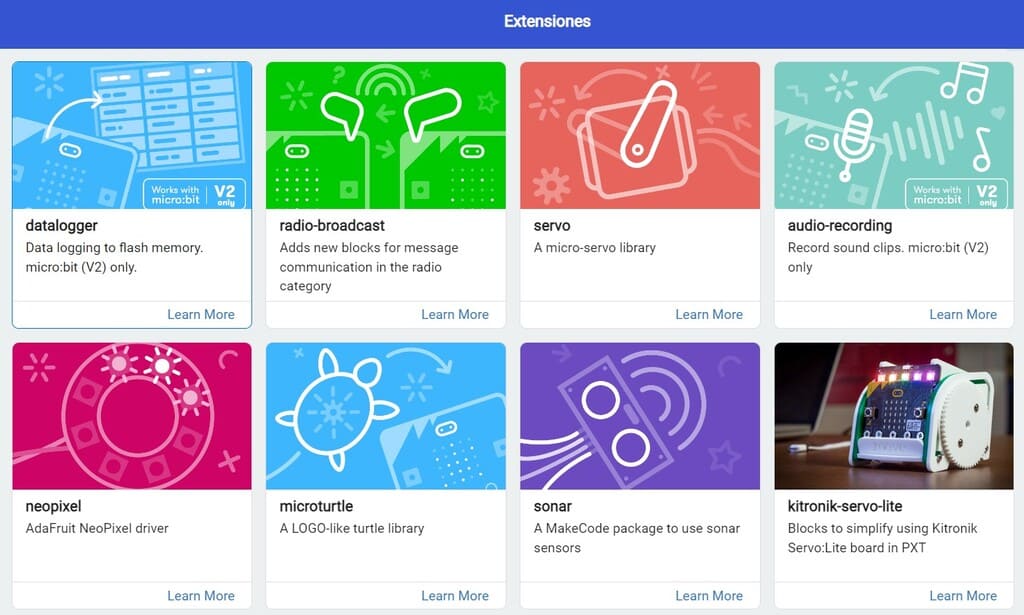
- Extensibilidad: casi todos los entornos de programación por bloques son extensibles. Esto quiere decir que además de las funciones que integran por defecto, disponen de extensiones que podemos activar para programar funciones concretas de ámbitos específicos que nos interesen, como por ejemplo: comunicación por radio frecuencia, control de servo motores, cadenas de píxeles, sonar, etc.
Veamos un pequeño ejemplo de cómo podríamos utilizar la programación por bloques en tareas que podrían ser parte de vuestro día a día: controlar un robot aspiradora. Piensa que que tienes un robot aspiradora en el aula y quieres programarlo para que limpie solo la zona de trabajo. Este podría ser un plan de trabajo:
- Usamos bloques para definir el área por la que va a moverse (los límites del escenario).
- Establecer un punto de inicio, que simbolizará la estación de carga.
- Establecemos un patrón de limpieza.
- Programar el robot para que regrese a su estación de carga después de terminar su tarea.
Estas son sólo algunas pinceladas de cómo funcionan los entornos de programación con lenguajes de bloques. A lo largo de las tareas prácticas que haremos, lo veremos con mucha más profundidad.
6.5.2. Desarrollo de habilidades con la programación de bloques.
La programación con lenguajes de bloques no solo es divertida, sino que también nos ayuda a desarrollar habilidades importantes:
- Pensamiento lógico: aprendemos a organizar nuestros pensamientos de manera secuencial y lógica, lo que es crucial para resolver problemas.
- Creatividad: al tener la libertad de experimentar con diferentes bloques sin preocuparnos por errores de sintaxis, podemos ser más creativos en la forma en que programamos nuestros robots.
- Colaboración: los lenguajes de bloques suelen ser muy intuitivos, lo que nos permite trabajar en equipo y compartir ideas fácilmente.

La programación con lenguajes de bloques es una herramienta potente y accesible que nos permite llevar a la realidad las funciones que queremos para los robots. A medida que experimentemos, ganaremos conocimientos que nos serán útiles tanto dentro como fuera del aula. Con cada bloque que encajamos, no solo construimos programas, sino también nuestra capacidad para pensar como programadores y resolver problemas como ingenieros.
6.6. Proyectos de robótica con Arduino
Ahora nos toca llevar a la práctica todo lo anterior.