Estos contenidos prácticos complementan la parte teórica de los temas 4. Fundamentos de la computación física, 5. Internet de las cosas y 6. Robótica del currículo de Computación y Robótica de 1º ESO.
Tabla de contenidos
- 1. Objetivo
- 2. ¿Qué sensores del coche podemos usar?
- 3. ¿Cómo programamos el sensor?
- 4. Ajustar el programa
1. Objetivo
Queremos programar un coche Maqueen para que sea capaz de seguir una trayectoria dibujada en el suelo con una línea negra sobre fondo blanco.
La línea debe tener un grosor aproximado de unos 15mm.
🛠 Materiales:
- 1 x Placa Microbit.
- 1 x Robot Maqueen.
- 1 x Cable micro USB.
2. ¿Qué sensores del coche podemos usar?
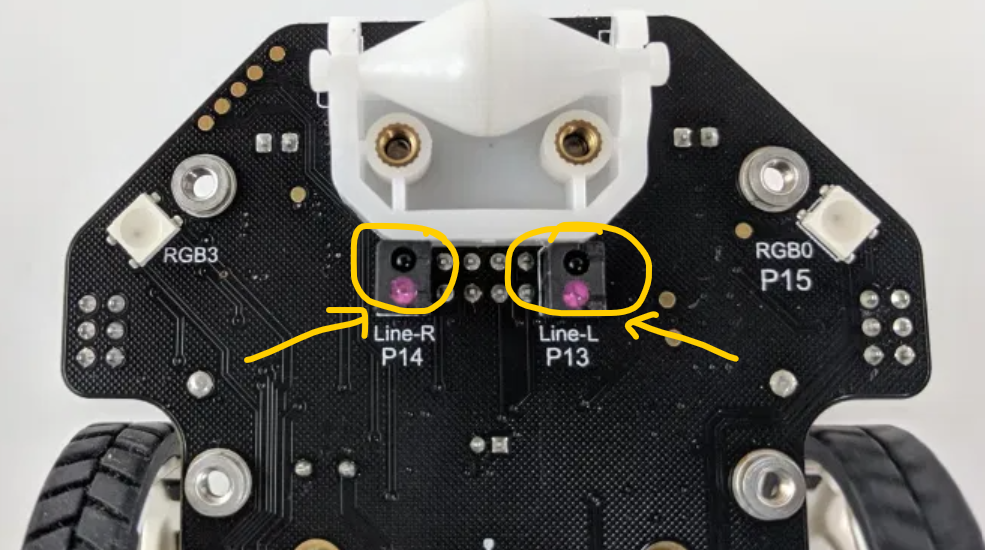
Maqueen en su parte inferior dispone de dos parejas de sensores especializados que le indican si la superficie por la que está circulando refleja la luz o no.
Estos dos sensores utilizan dos componentes básicos cada uno: un LED que emite luz infrarroja y un fototransistor que detecta si la luz se ha reflejado o no.

3. ¿Cómo programamos el sensor?
En Makecode tenemos un bloque que lee el valor del sensor izquierdo y del sensor derecho y nos devuelve 1 o 0 dependiendo de si la luz se ha reflejado o no.

De esta manera, ese bloque devolverá un 1 si detecta blanco, y 0 si detecta negro.
Así, tenemos que ir leyendo constantemente el valor que devuelve tanto el sensor derecho como el izquierdo para saber si debemos hacer que el coche simplemente avance o gire hacia algún lado.
Si lo piensas bien, sólo podemos tener tres casos posibles:
1️⃣ Cuando ambos sensores devuelven 1.

Los dos están sobre superficie blanca, así que están en la trayectoria correcta. Lo único que tiene que hacer el coche es avanzar.

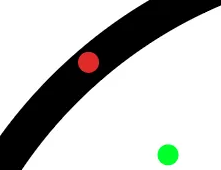
2️⃣ Cuando el sensor izquierdo devuelve 1 y el derecho 0.

La parte derecha está sobre superficie negra, así que está pisando la línea. El coche debe girar levemente a la derecha para corregir su trayectoria y colocar la línea entre ambos sensores.
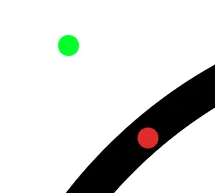
3️⃣ Cuando el sensor izquierdo devuelve 0 y el derecho 1.

La parte izquierda está sobre superficie negra, así que está pisando la línea. El coche debe girar levemente hacia la izquierda para corregir su trayectoria y colocar la línea entre ambos sensores.
4. Ajustar el programa
Cuando realices tus primeros intentos para intentar hacer que el coche siga la trayectoria correcta, verás cómo a veces el coche se sale completamente de la línea, tu coche gira demasiado o gira tan poco que parece tener dificultades para seguir su camino.
Es perfectamente normal, lo que debes hacer es ir probando velocidades de avance y giro distintas hasta que consigas encontrar esa combinación de velocidades y tiempos de giro que hacen que complete la trayectoria de manera suave.