Estos contenidos prácticos complementan la parte teórica de los temas 4. Fundamentos de la computación física, 5. Internet de las cosas y 6. Robótica del currículo de Computación y Robótica de 1º ESO.
Tabla de contenidos
- 1. Objetivo
- 2. Construir la «puerta de entrada»
- 3. Equipar al coche
- 4. Construir la «puerta de salida»
- 5. Calcular la velocidad
1. Objetivo
Seguramente, cuando has ido conduciendo por alguna de las carreteras que usas habitualmente, habrás advertido cómo en determinados tramos, el asfalto mostraba marcas como la de esta imagen:

Se trata de espiras de tráfico, de la DGT, y sirven para medir la intensidad del tráfico así como de las velocidades medias.
Utiliza un concepto muy básico de la cinemática, basado en calcular el tiempo que tarda un vehículo en pisar las dos filas de marcas. Con esos dos valores se puede medir la velocidad a la que circulan los vehículos.
Si se tardan 2s en llegar de una marca a otra y están separadas 10m, solo tenemos que aplicar la conocida fórmula de la velocidad = distancia / tiempo, y tendremos una medida de la velocidad que llevaba el vehículo.
Pues eso es lo que vamos a hacer con nuestra Micro:bit y nuestro Maqueen.
🛠 Materiales:
- 1 x Placa Micro:bit.
- 1 x Robot Maqueen.
- 1 x carretera de cartón.
- 4 x Cables de cocodrilo.
- Papel de aluminio.
- Cinta adhesiva para cartón.

Para detectar cada una de las marcas de la carretera construiremos dos «puertas». Cada una de las puertas debe detectar el paso del coche.
2. Construir la «puerta de entrada»
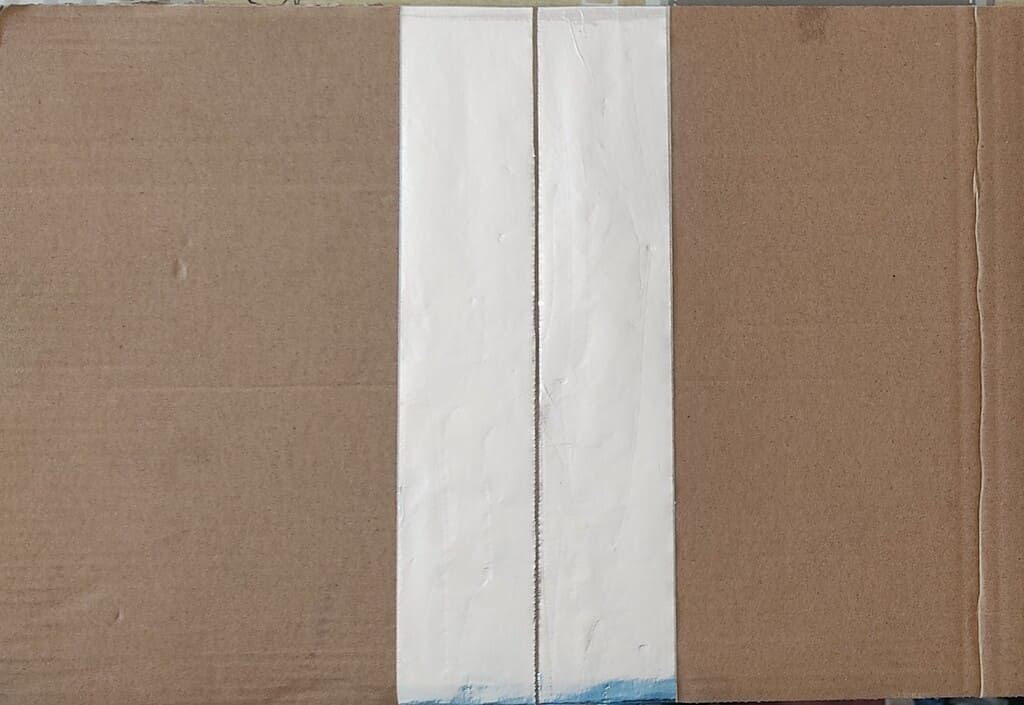
Para construir una puerta extenderemos dos bandas de aluminio lo más pegadas posible, sin que se toquen (puedes hacerlo usando cinta de doble cara, o cualquier otro método que se te ocurra).
Ahora conecta un cable de cocodrilo a cada una de las bandas de aluminio, lleva un cable al Pin 0, y el otro al Pin GND.
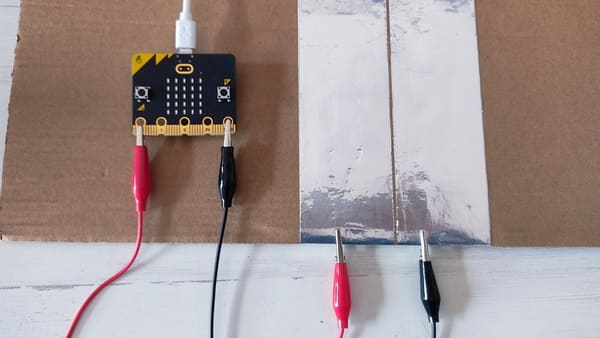
La primera puerta, está lista para detectar el paso del coche.
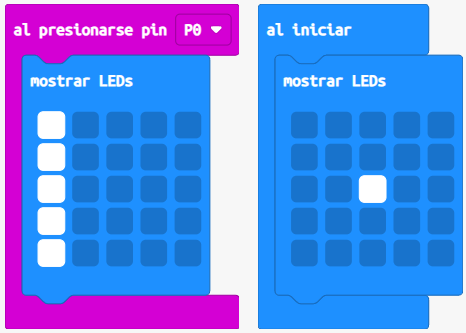
La Micro:bit viene equipada con un bloque de evento llamado al presionarse pin, que se activa cuando se detecta un circuito entre GND y el PIN 0 -u otro que hayas conectado-. El circuito conductor puede ser un cable o incluso tu propio cuerpo.
Lo que haremos será que colocaremos en la base del coche una pieza de aluminio, de manera que cuando pase por la hendidura entre las dos bandas de aluminio, haga contacto con ambas bandas, las conecte, cierre el circuito y dispare el evento.
Así que, añade esto a tu código en Makecode, para indicar que el coche ha pasado por la primera puerta:
Veamos si funciona, probando a cerrar el circuito con nuestra mano:
Bien, nuestro circuito se cierra y se lanza el evento correctamente.
3. Equipar al coche
Ahora vamos a equipar nuestro coche con el elemento que funcionará como ha hecho nuestro dedo. Vamos a instalarle una pequeña banda de aluminio (cualquier conductor serviría) que irá arrastrando sobre el suelo, y que debe ser lo suficientemente ancho como para que pise ambas bandas de aluminio de la carretera:
4. Construir la «puerta de salida»
De la misma manera que hemos hecho con nuestra «puerta de entrada», procedemos con nuestra «puerta de salida». En mi caso, he separado ambas «puertas» unos 30cm.

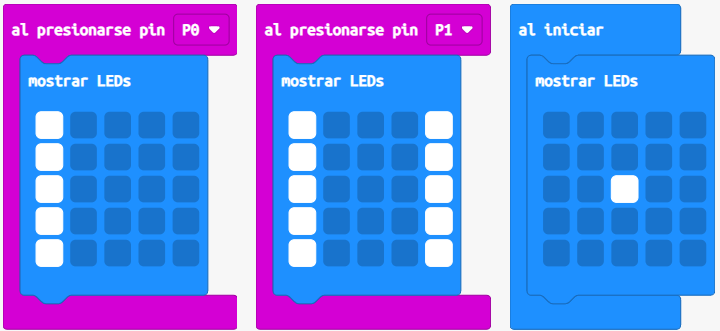
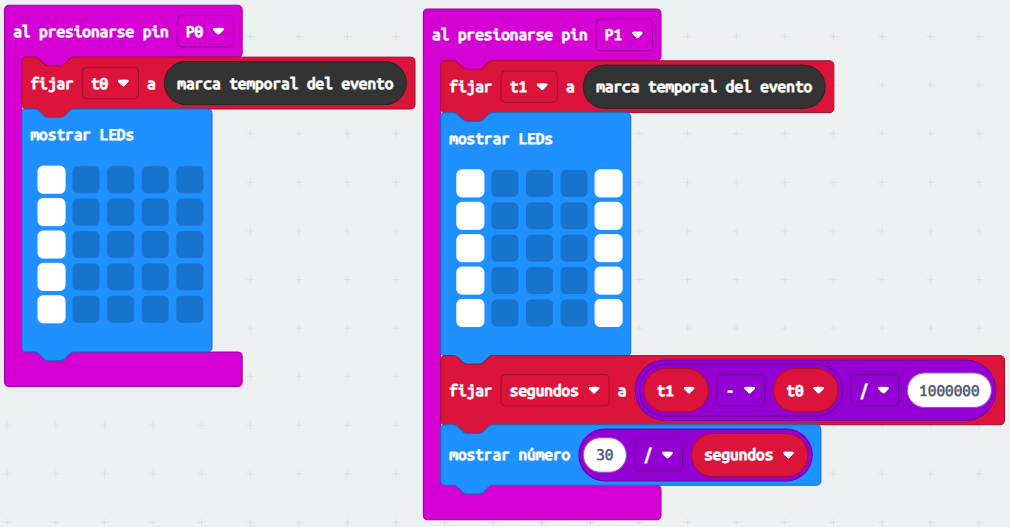
Y además, necesitamos modificar nuestro código para que incorpore el paso por la segunda puerta, que en este caso la tendremos conectada al PIN 1, y también a GND -tal y como hicimos con la primera-:
5. Calcular la velocidad
¿Cómo registramos el tiempo que lleva activa cada puerta? Usando el bloque:

Este bloque devuelve un «timestamp» del último evento que se ejecutó, y se mide en microsegundos. Si tenemos esa marca del paso del coche por ambas puertas, restamos el segundo (t1) del primero (t0) y tendremos el tiempo en microsegundos que ha transcurrido entre ambas. Dividiendo ese tiempo por 1.000.000 tenemos los segundos que ha tardado.
Como sabemos que la distancia entre las dos es de 30cm, ya podemos calcular la velocidad en cm/s:
velocidad = 30cm / (t1 – t0)
Veamos nuestro radar de suelo terminado en acción.
Como se puede ver en la matriz de LEDs de la Micro:bit, mi coche viaja a 13,94 cm/s, ¿y el tuyo?.